-
 Ansys SCADE Student
Ansys SCADE Student
Ansys SCADE Student
Ansys SCADE Student ofrece acceso gratuito a un entorno de desarrollo basado en modelos para software integrado crítico. Este entorno de diseño integrado se puede utilizar para aplicaciones que incluyen gestión de requisitos, diseño basado en modelos, simulación, verificación, generación de código calificado/certificado e interoperabilidad con otras herramientas de desarrollo. SCADE se usa a menudo para sistemas de control de vuelo y control de motores, sistemas de tren de aterrizaje, pilotos automáticos, sistemas de frenado de emergencia, dirección asistida electrónica en automóviles y mucho más.

Todo Cargado y un Lugar Adonde Ir
[vc_row][vc_column][vc_column_text dp_text_size="size-3"]Ample recurre al Ansys Startup Program para diseñar su innovadora plataforma modular de intercambio de baterías para vehículos eléctricos [/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]El cambio climático se está acelerando y la necesidad de cambiar nuestros vehículos que consumen mucha gasolina por vehículos totalmente eléctricos es real. Sin embargo, muchos dudan en hacer el cambio. La ansiedad por el alcance, o el miedo a quedarse sin batería, es un factor importante que alimenta esta vacilación. Sin la infraestructura adecuada, los conductores pueden encontrarse varados en el camino a su destino.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]También está la cuestión de la capacidad de carga. Conectarlo y encenderlo puede llevar entre 4 y 10 horas con un cargador de 240 V, lo que hace que los viajes de larga distancia sean una verdadera tarea. Ample propone una solución a los desafíos de carga que está ganando terreno rápidamente en la comunidad automotriz: el intercambio modular de baterías.[/vc_column_text][vc_video link="https://www.youtube.com/watch?v=5QeQ3VM4A4w" align="center"][rs_space lg_device="30" md_device="" sm_device="" xs_device=""][vc_column_text]
La simulación inspira una forma completamente nueva de energizar un vehículo eléctrico
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Algún día, cargar su vehículo eléctrico (EV) podría ser tan simple como detenerse y cambiar la batería. Ample acorta el viaje para cargar completamente a poco menos de cinco minutos para cualquier vehículo eléctrico en su plataforma, independientemente de la densidad de la batería. Los conductores pueden registrarse en una estación de intercambio, donde la batería modular "vacía" de su vehículo eléctrico se reemplaza rápidamente por una "llena" antes de volver a la carretera.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Al dividir un paquete de baterías para vehículos eléctricos en componentes modulares más pequeños, Ample tiene como objetivo crear un sistema de batería modular que pueda adaptarse a múltiples tamaños y formas de vehículos con diferentes capacidades de batería para adaptarse a todos. Para ello, la startup de automoción utiliza una simulación, a la que se accede a través del Ansys Startup Program . El programa permite a las empresas emergentes en etapa inicial y intermedia con acceso limitado a financiamiento un conjunto completo de software de simulación multifísica, además de computación de alto rendimiento (HPC), a un precio asequible.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Normalmente, el tiempo y el costo son los desafíos más comunes en la industria automotriz: desafíos que Ample enfrentó y superó con la simulación. La simulación puede acortar significativamente los ciclos de diseño y ahorrar dinero y tiempo que Ample puede dedicar a otra cosa. Incluso cuando se requiere una prueba física, la simulación puede limitar de manera eficiente las variables clave involucradas para reducir el número total de prototipos físicos.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1552" img_size="full" alignment="center"][vc_column_text]
Simulaciones térmicas de Ansys Fluent de módulos de batería amplia utilizando un modelo de circuito equivalente (ECM) multiescala y multidominio (MSMD).
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Ample también recurrió a la simulación para abordar los desafíos de embalaje y gestión térmica, así como otros defectos inesperados en las celdas de la batería que podrían comprometer la seguridad del vehículo. Varias simulaciones térmicas y de flujo en Ansys Fluent ayudaron al equipo a comprender la física básica y el comportamiento del flujo térmico en la estructura del módulo de batería, lo que aceleró el tiempo necesario para lograr un diseño final.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]"Como ingeniero CAE, he utilizado Fluent desde mi época universitaria y a lo largo de mi carrera en diversas aplicaciones, como automoción, energía solar, intercambiadores de calor y semiconductores", afirma Cho. "En las etapas iniciales de nuestro trabajo, la oferta del Programa Ansys Startup satisfacía perfectamente nuestras demandas".[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Las soluciones de Ansys también fueron fundamentales en el desarrollo de estaciones de intercambio con sistemas robóticos simples y rentables que son redundantes, fáciles de implementar y necesitan un espacio mínimo para operar. En última instancia, la simulación ayudó a Ample a llegar a un diseño flexible que se puede implementar en días y admitir una amplia gama de aplicaciones de vehículos, desde automóviles pequeños hasta camiones grandes de clase tres en la misma estación, utilizando las mismas baterías modulares.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1553" img_size="full" alignment="center"][vc_column_text]
Modelo Ansys Twin Builder (ROM) de módulos de batería amplios que utilizan ECM y LTI
[/vc_column_text][rs_space lg_device="30" md_device="" sm_device="" xs_device=""][vc_column_text]
Ample democratiza viajes más limpios para todos
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Quizás el resultado más interesante de este esfuerzo sea la modularidad de las propias baterías. La tecnología es excelente, pero el precio de entrada sigue siendo prohibitivo para la mayoría de los consumidores. El equipo de Cho, al trabajar con fabricantes de equipos originales (OEM), tiene en mente otra solución innovadora que reducirá significativamente las barreras a la propiedad.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]“En lugar de vender paquetes de baterías dentro del automóvil, intentamos vender el vehículo sin ellos”, dice Cho. “Su nuevo vehículo vendría equipado con un módulo de batería intercambiable. El módulo de batería no es tuyo. Solo estás pagando por la electricidad necesaria para cargarlo por completo. Esto supondrá un verdadero cambio en términos de precio”.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Como era de esperar, los OEM están haciendo cola para conocer las soluciones de Ample.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]"Nuestro intercambio modular de baterías tiene la ventaja única de hacer posible que casi cualquier vehículo eléctrico sea intercambiable sin requerir ninguna modificación en el vehículo", dice Cho. “Estamos comprometidos con algunos de los fabricantes de automóviles más grandes del mundo para preparar sus vehículos eléctricos para venderlos con la tecnología de Ample. Esto les permite superar una barrera importante para la adopción de vehículos eléctricos, que es la disponibilidad de infraestructura eléctrica y la velocidad de entrega de energía, especialmente a los socios de flotas para quienes el costo y la velocidad marcan una diferencia significativa”.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Hay mucha preocupación por el futuro de nuestro planeta. Detrás de escena, empresas emergentes como Ample tienen grandes ideas (y la ayuda de Ansys) que podrían cambiarlo. [/vc_column_text][/vc_column][/vc_row]

Marcando el Comienzo de la Siguiente Fase del Diseño de Motores Eléctricos
[vc_row][vc_column][vc_column_text dp_text_size="size-4"]Desde la industria automotriz hasta la aviación y las aplicaciones industriales, los motores eléctricos están en el centro de atención hoy en día. Pero todavía existen desafíos para una adopción generalizada, incluidos los niveles de potencia y la confiabilidad. Optiphase Drive Systems está utilizando el software Ansys para lanzar un innovador diseño de motor de cinco fases que podría impulsar un cambio revolucionario. [/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Cuando se trata de ingeniería de motores de vehículos eléctricos (EV), un diseño trifásico es el estándar de la industria para transformar energía eléctrica en energía mecánica. Inventados por M. Dolivo-Dobrovolski en 1889 para AEG, Alemania, los motores trifásicos se basan en tres corrientes alternas de la misma frecuencia para generar las interacciones electromagnéticas capaces de impulsar un vehículo.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Los motores trifásicos son muy adecuados como motores de tracción para unidades de propulsión de vehículos eléctricos. Sus niveles de potencia de salida pueden llegar a 400 kW con una velocidad de rotación del motor de hasta 25.000 rpm, soportando velocidades del eje del vehículo de hasta 1.200 rpm.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Si bien el rendimiento de los motores trifásicos es impresionante, también tienen limitaciones. Por ejemplo, carecen del par y la potencia necesarios para aplicaciones de vehículos eléctricos de próxima generación, como la maquinaria aeroespacial y pesada. También tienen una tolerancia limitada a fallos; si falla sólo una de las tres fases, el motor pierde par y se detiene. Y, por último, la solución más común para los motores de tracción de vehículos eléctricos utiliza imanes permanentes de alta energía que contienen metales de tierras raras, lo que supone un problema de sostenibilidad.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Daniel Vicario y Siavash Sadeghi fundaron Optiphase Drive Systems (ODS) para abordar estas limitaciones y ampliar el uso de vehículos eléctricos más allá de los vehículos livianos. La startup con sede en Texas está aprovechando el software Ansys para lanzar un diseño de motor EV de cinco fases que podría cambiar la industria y está atrayendo la atención tanto de inversores como de agencias gubernamentales. El programa Ansys Startup apoya sus esfuerzos para hacer que los motores de vehículos eléctricos sean más potentes, más confiables y más sostenibles.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1544" img_size="full" alignment="center"][vc_column_text]
Un adelanto del sistema integrado en desarrollo en ODS que combina el motor de cinco fases y el controlador de la empresa en un diseño compacto.
[/vc_column_text][rs_space lg_device="30" md_device="" sm_device="" xs_device=""][vc_column_text]
Motor eléctrico cinco fases: una idea cuyo momento ha llegado
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Vicario y Sadeghi trabajaron juntos en Capstone Turbine (ahora Capstone Green Energy), un fabricante de turbinas de gas. Cuando ambos dejaron la empresa en 2015, decidieron mantenerse en contacto gracias a su pasión compartida por el diseño de motores y el emprendimiento. Vicario pasó a ocupar puestos en Parker Aerospace y Eaton, mientras que Sadeghi trabajó para Honeywell, Supernal e Hyperloop. Durante años mantuvieron un estrecho contacto.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]"Sabía que Siavash estaba perfeccionando su diseño para un motor eléctrico de cinco fases, y representaba una gran idea, una que realmente podría revolucionar la industria energética y ofrecer enormes beneficios a la sociedad", dice Vicario, director ejecutivo de ODS. "Sólo teníamos que esperar el momento adecuado".[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]El innovador diseño del motor fue desarrollado por Sadeghi, ahora director de tecnología de ODS, mientras obtenía su doctorado. en diseño y control de máquinas eléctricas en el Instituto de Tecnología de Georgia. “Como estudiante de doctorado, investigué mucho y creé prototipos para el concepto del motor de cinco fases, y seguí perfeccionándolo en mi tiempo libre a medida que mi carrera despegaba”, señala.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]"Finalmente, pude llegar a un punto en el que creí que la tecnología podría comercializarse con éxito", continúa Sadeghi. "Tanto Daniel como yo nos dimos cuenta de que era hora de dedicarnos a esto a tiempo completo".[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]A principios de 2017, Vicario y Sadeghi fundaron ODS para centrarse en transformar esa idea en un producto patentado y comercializado.[/vc_column_text][rs_space lg_device="30" md_device="" sm_device="" xs_device=""][vc_column_text]
Impulsando un progreso espectacular en la electrificación de vehículos
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Los motores cinco fases funcionan de la misma manera que los motores trifásicos. Sin embargo, como el par es proporcional al número de fases, a partir del mismo volumen de motor y misma corriente se consigue un aumento de más del 15% del par. Los motores cinco fases ODS ofrecen un 17 % más de potencia, un rango de velocidad un 6 % más alto y un 40 % menos de carga de corriente por interruptor, todo sin aumentar el tamaño o el peso del motor, una enorme mejora con respecto a los motores trifásicos. Esas especificaciones podrían hacer que los motores de vehículos eléctricos sean adecuados para una nueva gama de aplicaciones de alta potencia.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]"La impresionante potencia y par que ofrece este motor abrirá la puerta a una gama completamente nueva de industrias y clientes", señala Sadeghi. "Los vehículos pesados, como los de las industrias aeroespacial, de defensa, marina, de construcción y agrícola, ahora pueden electrificarse, sin la necesidad de propulsarlos con múltiples motores". Un algoritmo de control patentado desarrollado por Sadeghi, llamado ADAPTIV, ayuda a minimizar la corriente requerida por cada interruptor, mientras maximiza la densidad de potencia. El resultado es un diseño más pequeño y liviano que ofrece una potencia extremadamente alta.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Los motores de cinco fases de ODS también tienen una tolerancia a fallos mucho mayor que los diseños trifásicos actuales. Pueden fallar hasta dos fases y el motor ODS seguirá produciendo par. Esto representa una mejora significativa en la confiabilidad con respecto a los diseños trifásicos.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Debido a que Vicario es un ex oficial de la Marina de los Estados Unidos y aviador, el tema de la confiabilidad le preocupa especialmente. "Durante el tiempo que volaba en misiones de ataque y reconocimiento de largo alcance de los buques de guerra de la Marina de los EE. UU., experimenté una falla en el equipo causada por un cortocircuito, que casi me cuesta la vida", explica. “Por eso me apasiona tanto el rendimiento fiable. Ya sea un automóvil familiar que circula por una ubicación remota, un vehículo de primeros auxilios que se dirige a una emergencia o una aplicación aeroespacial avanzada, simplemente no podemos permitir fallas en los motores de los vehículos eléctricos. Nuestro diseño de cinco fases reduce drásticamente ese riesgo”. [/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]El impacto medioambiental también juega un papel clave en los motores eléctricos. Gracias a su tecnología de cinco fases y sus diseños patentados, los motores para vehículos eléctricos de ODS requieren menos metales de tierras raras. Según Vicario y Sadeghi, esa es una ventaja importante en una industria basada en la premisa de la responsabilidad ambiental. También contribuye a una reducción de costes estimada del 25 % en comparación con la generación actual de motores eléctricos trifásicos.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1545" img_size="full" alignment="center"][rs_space lg_device="15" md_device="" sm_device="" xs_device=""][vc_column_text]
Impulsando la comercialización con Ansys
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Si bien Vicario y Sadeghi no quieren revelar demasiado, los fabricantes de equipos pesados, los fabricantes de automóviles y las agencias gubernamentales de EE. UU. ya están notando el diseño de su motor de cinco fases. Como solo un ejemplo, ODS demostró recientemente su tecnología a la Fuerza Aérea de EE. UU. como parte de su Desafío de generación de energía de sistemas de aeronaves no tripuladas (UAS). ODS obtuvo este honor al presentar una propuesta y avanzar a la siguiente ronda de competencia, superando a algunos de los líderes aeroespaciales del mundo.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Según Sadeghi, la simulación de ingeniería ha sido fundamental para hacer avanzar el concepto, verificar el rendimiento y demostrar su potencial tanto a clientes como a inversores. “A finales de 2022, construimos un prototipo de motor físico en colaboración con la Universidad de Texas en Dallas. No hubo sorpresas porque la simulación ya había predicho el éxito del diseño. Siempre será necesaria una prueba física de concepto, pero la simulación ahorra enormes cantidades de tiempo y dinero en el camino para llegar allí.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]"Sin simulación, necesitaríamos gastar millones de dólares para construir prototipos físicos e iterarlos, y eso simplemente no es posible para una startup", añade Sadeghi. “El software Ansys nos permite modificar componentes como imanes de forma iterativa, no solo para probar inicialmente nuestro concepto, sino también para ajustar el diseño básico para diferentes aplicaciones industriales y de clientes. Ansys es único porque la gama de su conjunto de herramientas nos permite observar simultáneamente los aspectos electromagnéticos y electromagnéticos. aspectos de rendimiento mecánico, así como explorar compensaciones”.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1546" img_size="full" alignment="center"][vc_column_text dp_text_size="size-4"]Tanto Vicario como Sadeghi están agradecidos por la oportunidad de acceder a las licencias de software de Ansys a través del Ansys Startup Program. "Ansys está literalmente invirtiendo en el futuro de pequeñas empresas como ODS al brindarnos acceso a herramientas de desarrollo líderes en la industria", enfatiza Vicario. “Cuando inicias un negocio, no tienes mucho flujo de caja. El programa Ansys Startup realmente nos ha mantenido en el juego financieramente. Estamos en un lugar realmente emocionante y no estaríamos aquí sin Ansys”.[/vc_column_text][rs_space lg_device="10" md_device="" sm_device="" xs_device=""][vc_separator border_width="2"][vc_column_text dp_text_size="size-4"]“El software Ansys nos permite modificar componentes como imanes de forma iterativa, no solo para probar inicialmente nuestro concepto, sino también para ajustar el diseño básico para diferentes aplicaciones industriales y de clientes. Ansys es único porque la gama de su conjunto de herramientas nos permite observar simultáneamente los aspectos electromagnéticos y electromagnéticos. aspectos de rendimiento mecánico, así como explorar compensaciones”.[/vc_column_text][rs_space lg_device="5" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]
Siavash Sadeghi, director de tecnología de ODS
[/vc_column_text][/vc_column][/vc_row]

La Simulación Amplía los Límites de la Movilidad Extrema
[vc_row][vc_column][vc_column_text dp_text_size="size-4"]Sintonice el episodio cinco de "Driven by Simulation" y vea cómo Polaris y Potential Motors utilizan el software Ansys para repensar el diseño de vehículos recreativos.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Para algunos ciclistas, donde termina el pavimento, comienza la aventura. El uso todoterreno a menudo amplía las capacidades del vehículo en direcciones nuevas e inexploradas. Simplemente súbete, luego fija tu mirada en cualquier horizonte y avanza: arriba y sobre surcos, rocas, desniveles, baches y caminos nivelados, o vadeando arroyos.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Hoy en día, el entusiasmo por el deporte está creciendo, a medida que los adictos a la adrenalina en la carretera cambian de marcha para salirse de los caminos trillados. En 2020, el mercado de vehículos todoterreno (ORV) acumuló más de 12.300 millones de dólares en todo el mundo . El turismo de aventura también está atrayendo a una base de fanáticos más adinerados del deporte, específicamente el turismo por tierra (exploración del interior del país en vehículos todoterreno bien equipados), que se encuentra en una trayectoria de crecimiento que comenzó con $586 mil millones de dólares en 2019 y aumentará a $1,63 mil millones de dólares en 2026[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Durante el quinto episodio de nuestra serie documental en línea "Impulsado por la simulación", visitamos al líder mundial en deportes de motor Polaris y a la nueva empresa de tecnología automotriz Potential Motors para ver cómo se están abriendo de par en par en el rendimiento de los ORV con un poco de ayuda de Ansys.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1531" img_size="full" alignment="center"][rs_space lg_device="15" md_device="" sm_device="" xs_device=""][vc_column_text]
La simulación es la estrella polar de Polaris para la innovación todoterreno
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Piensa en el exterior, vive la experiencia de montar en bicicleta y trabaja para mejorarla. Es una visión que ha impulsado la innovación impulsada por los ciclistas en Polaris desde 1954, hasta el punto de que todos los que trabajan en el taller utilizan el producto para comprender su rendimiento y los desafíos del camino que les espera. RZR XP, el vehículo deportivo todoterreno más vendido de Polaris, ejemplifica este espíritu, junto con el alto nivel de innovación impulsada por el conductor que esperarías de un líder global de la industria de deportes de motor. [/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1532" img_size="full" alignment="center"][vc_column_text dp_text_size="size-4"]David Elia, director de planificación de productos y recreación de Polaris, dice que su equipo se inspira mucho en los clientes, lo cual es una de las principales razones del éxito del RZR XP. Polaris considera esta retroalimentación y luego actúa en consecuencia anticipándose a las tendencias del mercado para seguir siendo competitiva. Una actualización reciente, por ejemplo, se centró en ofrecer más comodidad y capacidad durante todo el día en un diseño más resistente. Para hacer esto, en parte, fue necesario aumentar la resistencia del chasis con la ayuda de Ansys.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]"Nuestro chasis es aproximadamente un 25 % más resistente o más rígido de lo que era antes", afirma Elia. “Con la simulación pudimos saber a partir de las entradas lo que necesitábamos del chasis. Pudimos fabricar un chasis completamente soldado y sin tornillos que era mucho más resistente”.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Para llegar al nuevo diseño de motor bicilíndrico paralelo Pro Star Gen 2 de 114 caballos de fuerza del RZR XP, Polaris recurrió al software de dinámica de fluidos computacional Ansys para comprender el flujo de aire que entra y sale del motor. Centrarse en la dinámica de fluidos permitió al equipo optimizar el cabezal, la cámara de combustión y las vías de admisión y escape para generar más potencia. A partir de ahí, los componentes del embrague y la línea motriz también se actualizaron para mayor durabilidad.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Polaris también utilizó la simulación para garantizar que el motor pudiera funcionar consistentemente como estaba previsto: a través de áreas rocosas, dunas, barro y bosques profundos durante horas fuera de la carretera en condiciones difíciles.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1533" img_size="full" alignment="center"][vc_column_text]
David Elia, director de planificación de productos - Recreación, Polaris
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]"Diseñar un sistema de refrigeración del motor que sobreviva a todas estas condiciones no es algo trivial", afirma Pratik Chandan, director de ingeniería sénior de Polaris. "Uno de los problemas que tenemos es que necesitamos aprender las interacciones físicas de los sistemas complejos juntos en el entorno virtual y eso es lo que nos ayudan a hacer las herramientas de simulación como Ansys".[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1534" img_size="full" alignment="center"][vc_column_text]
El enfriamiento del motor es solo una de las características de ingeniería que Polaris simuló con las soluciones Ansys.
[/vc_column_text][rs_space lg_device="30" md_device="" sm_device="" xs_device=""][vc_column_text]
Potential Motors se enfrenta al terreno más difícil con simulación
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]El todoterreno requiere habilidad, ya que hay mucho que considerar en el camino. Comprender los ángulos de aproximación, salida y ventral de un vehículo; saber cuándo golpearlo o cuándo aflojar; o elegir el momento adecuado para inflar los neumáticos puede significar la diferencia entre pasar o quedarse atascado. [/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1535" img_size="full" alignment="center"][vc_column_text]
Sam Poirier, director ejecutivo de Potential Motors, explica el concepto de sistemas proactivos para vehículos que utilizan cámaras y sensores.
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Potential Motors, miembro del Ansys Startup Program , está facilitando el desarrollo de vehículos todoterreno totalmente eléctricos que pueden ver, comprender y prepararse proactivamente para el terreno más difícil que se avecina, habilitado por software, inteligencia artificial (IA), y un conjunto de sensores. El objetivo final de todo esto es permitir que cualquier conductor, independientemente de su nivel de habilidad, pueda afrontar los terrenos más desafiantes con confianza.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]La empresa de tecnología automotriz ha trabajado mucho para construir una plataforma que refleje su visión de cómo podría verse un vehículo definido por software (SDV) en una aplicación de vehículo eléctrico, extendiéndose más allá de los límites de lo que está disponible en el mercado hoy en día. , y luego poner a prueba esa visión. [/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]"Pasamos mucho tiempo en simulaciones tratando de descubrirlo, sabes todo, desde qué verá el lidar hasta cómo reaccionará el chasis, por lo que este vehículo en sí es nuestra propia plataforma", dice Sam Poirier, Co- fundador y director ejecutivo de Potential Motors. "Lo construimos desde cero, porque realmente queríamos un vehículo definido por software para todo terreno y, sorprendentemente, no hay uno disponible para que lo usemos".[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1536" img_size="full" alignment="center"][vc_column_text]
Bill Lamey, director de tecnología de Potential Motors, analiza la tecnología de detección remota con la presentadora de Driven by Simulation, Miss Emma Walsh.
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]El software ya es compatible con los sistemas avanzados de asistencia al conductor (ADAS) que estamos acostumbrados a ver en nuestros vehículos. Pero en el futuro nuestros vehículos estarán definidos principalmente por software. También conocidos como SDV, tendrán la capacidad de dar forma a nuestras experiencias de conducción a través de la conectividad, la inteligencia artificial, la automatización y la personalización. [/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Al desarrollar su plataforma SDV, Poirier también se dio cuenta de que estaba resolviendo un problema fundamental relacionado con la eficiencia todoterreno que se extiende más allá del público recreativo hasta sectores comerciales como la minería o la tala, donde conquistar las condiciones ambientales es a menudo un requisito previo para la productividad diaria.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1538" img_size="full" alignment="center"][vc_column_text dp_text_size="size-4"]"Sin simulación creo que nos resultaría muy difícil construir algo como esto", afirma Poirier. “Especialmente, sabes que somos un equipo pequeño, somos una empresa nueva aquí en Canadá y, con recursos limitados, tienes que hacer las cosas de manera eficiente. La simulación significa que puedes hacer las cosas de manera eficiente. Puedes hacer mucho más con un equipo pequeño”.[/vc_column_text][rs_space lg_device="30" md_device="" sm_device="" xs_device=""][/vc_column][/vc_row]
Cómo Diseñar un Motor Silencioso
[vc_row][vc_column][vc_column_text dp_text_size="size-4"]Con la aparición de los vehículos eléctricos (EV), el análisis de ruido y vibraciones del motor eléctrico se ha convertido en una parte muy importante del diseño de sistemas de propulsión eléctricos. El motor de tracción eléctrica es ahora el único componente de propulsión de un vehículo eléctrico y su ruido ya no está enmascarado por un motor. Por lo tanto, es fundamental diseñar un motor silencioso, ya que cualquier chirrido no deseado del motor provocaría ruidos y vibraciones desagradables al conductor. Sin embargo, la reducción del ruido no deseado del motor no se limita en modo alguno a los motores de tracción eléctricos. En muchas otras aplicaciones de motores, como accionamientos industriales, HVAC y turbinas eólicas, la reducción del ruido y la vibración del motor son aspectos de diseño importantes.[/vc_column_text][rs_space lg_device="30" md_device="" sm_device="" xs_device=""][vc_column_text]
¿Qué tan ruidoso es el diseño de mi motor?
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]El ruido y la vibración son causados por una combinación de excitaciones (fuerzas electromagnéticas generadas por el motor) y la dinámica estructural del motor, es decir, las frecuencias naturales de la estructura. Una combinación desafortunada conduce a un gemido agudo, que generalmente es causado por una fuerza de excitación alta que se alinea con una frecuencia natural dominante de la estructura motora.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1515" img_size="full" alignment="center"][vc_column_text]
Figura 1. El chirrido del motor a menudo es causado por una fuerza de excitación alta que se alinea con una frecuencia natural dominante de la estructura del motor.
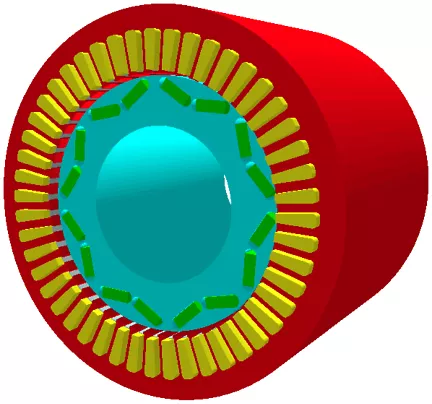
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Podemos demostrar cómo evaluar los niveles de ruido en un motor eléctrico con un ejemplo. A continuación se muestra un motor de tracción automotriz típico. Se trata de una topología de motor de imán permanente interior (IPM) con ocho polos y 48 ranuras.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1516" img_size="full" alignment="center"][vc_column_text]
Figura 2. Un motor de tracción típico de un automóvil.
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Una forma sencilla de evaluar en qué frecuencias es probable que obtengamos picos en la respuesta acústica es mediante un diagrama de Campbell. Este diagrama muestra las frecuencias (órdenes) de excitación dominantes como líneas diagonales con una relación lineal entre la frecuencia y la velocidad de rotación. Las frecuencias naturales de la estructura del estator del motor eléctrico se muestran como líneas verticales.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1517" img_size="full" alignment="center"][vc_column_text]
Figura 3. El diagrama de Campbell.
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Los picos de ruido suelen producirse donde las líneas se cruzan, lo que significa que a esa frecuencia, la fuerza electromagnética excita un modo estructural del estator. Para nuestro ejemplo, los modos estructurales más importantes son F0 (un modo de respiración excitado por la fuerza promedio alrededor del estator que cambia con el tiempo) y F8, un modo octaédrico excitado por la frecuencia de forzado fundamental debido a que el motor tiene ocho polos.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Un espectrograma muestra la respuesta acústica para cada orden de frecuencia. Cuando el orden de frecuencia cruza una frecuencia natural, la amplitud de la respuesta acústica, o potencia del sonido, es máxima, como se muestra en el espectrograma a continuación.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1519" img_size="full" alignment="center"][vc_column_text]
Figura 4. Cuando el orden de frecuencia cruza una frecuencia natural, la amplitud de la respuesta acústica, o potencia del sonido, es máxima.
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Al tomar una sección transversal de cada orden dominante (el llamado "corte de orden"), podemos trazar la potencia del sonido acústico en función de la velocidad de funcionamiento del motor. Esto nos permite identificar a qué velocidades/frecuencias se produce la mayor respuesta.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1520" img_size="full" alignment="center"][vc_column_text]
Figura 5. Gráfico que identifica qué velocidades/frecuencias provocan la mayor respuesta.
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text]
Cómo y cuándo mejorar un diseño para reducir el ruido
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]El diseño de motores eléctricos es un proceso complejo que involucra múltiples dominios físicos. Un diseñador de motores necesita evaluar qué tan ruidoso es su diseño en las primeras etapas del proceso de diseño, cuando se pueden realizar cambios fácilmente. Para ello, un diseñador de motores necesita acceso a una herramienta rápida de análisis de ruido, vibración y aspereza (NVH) durante el diseño conceptual de sus motores eléctricos. Un diseñador de motores probablemente buscaría reducir las excitaciones electromagnéticas, pero el siguiente ejemplo muestra que es muy importante considerar la respuesta acústica del motor a estas excitaciones si queremos reducir el ruido.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Para nuestro motor de ejemplo, los picos más altos en la respuesta acústica se producen a 8400 rpm y 9600 rpm. En el espectrograma, podemos ver claramente que a estas velocidades, se produce un pico cuando los órdenes armónicos 12 y 14 cruzan las frecuencias naturales de la estructura del estator (F0 y F8).[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Un análisis 2D de transformada rápida de Fourier (FFT) de las excitaciones de fuerza radial muestra que la mayor respuesta de ruido para nuestro motor de ejemplo proviene de tres pequeñas excitaciones resaltadas en el siguiente gráfico. La razón por la que estos pequeños armónicos generan una respuesta tan grande es porque la estructura del estator es más flexible para estos órdenes de forma y frecuencia particulares.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1522" img_size="full" alignment="center"][vc_column_text]
Figura 6. Armónicos espacio-temporales del estator.
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Esto resalta la importancia de un enfoque que combine forzamiento y respuesta, que permita a los ingenieros evaluar rápidamente el ruido y la vibración desde las primeras etapas del proceso de diseño. Si nos centráramos únicamente en reducir las excitaciones electromagnéticas, no nos preocuparíamos por estas pequeñas excitaciones; sin embargo, estos son claves para el ruido que genera este motor. En este caso, para reducir el ruido, podemos centrarnos en reducir la respuesta del estator en lugar de reducir aún más las ya pequeñas excitaciones.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]La respuesta del estator está definida por el comportamiento modal de la estructura del estator, el cual está determinado por sus dimensiones y materiales. Una forma de reducir la respuesta del estator es engrosando el hierro posterior del estator, lo que aumenta su rigidez y sus frecuencias naturales. Esto reducirá la amplitud del ruido en los picos de resonancia y aumentará la velocidad del motor a la que se produce la resonancia. Lo ideal es que aumentemos esta velocidad hasta que la resonancia se produzca por encima de la velocidad máxima de funcionamiento del motor.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1523" img_size="full" alignment="center"][vc_column_text]
Figura 7. El aumento del espesor del hierro posterior del estator reduce el ruido.
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Para nuestro ejemplo, el aumento en el espesor del hierro posterior del estator del motor eléctrico significa que las frecuencias de los modos estructurales F0 y F8 se desplazan hacia la derecha. La comparación de la respuesta resultante muestra una reducción en el pico de resonancia causado por el armónico 12 en 4 decibeles (dB). Esto se debe al aumento de la rigidez del estator para el modo estructural F0. El pico de resonancia debido al armónico 14 ha desaparecido por completo, ya que ya no cruza el modo estructural F8.[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_single_image image="1524" img_size="full" alignment="center"][vc_column_text]
Figura 8. Reducción del pico de resonancia.
[/vc_column_text][rs_space lg_device="20" md_device="" sm_device="" xs_device=""][vc_column_text dp_text_size="size-4"]Las herramientas de análisis NVH que se muestran arriba son las últimas incorporaciones a Ansys Motor-CAD . Motor-CAD es el software dedicado al diseño de motores eléctricos. Proporciona herramientas de análisis y diseño rápidas y precisas que incluyen todas las principales físicas, por ejemplo, electromagnéticas, térmicas, mecánicas y ahora NVH. La herramienta de análisis NVH utiliza una combinación de análisis de elementos finitos (FEA) y métodos analíticos para que los tiempos de simulación sean cortos. Esto permite al diseñador de motores incorporar el análisis NVH a su diseño conceptual multifísico y realizar cambios de diseño para evitar problemas de ruido desde el principio.[/vc_column_text][/vc_column][/vc_row][vc_row][vc_column][/vc_column][/vc_row]
